 |
Форум @ BelAstro.Net
Форум белорусской любительской астрономической сети
|
|
| Предыдущая тема :: Следующая тема |
| Автор |
Сообщение |
 Pova Pova
Модератор
Зарегистрирован: 10.07.2007
Сообщения: 1798
Благодарности: 15
|
|
Добавлено: Пн Фев 28, 2011 03:17 Заголовок сообщения: |
 |
|
Погонял трекер в связке с компом, лил данные на СОМ.
Пока подтвердилось то, что писали на форуме:
http://www.gpspassion.com/forumsen/topic.asp?TOPIC_ID=108384&whichpage=38
Картинку стянул оттуда же 
Если слушать трекер штатным кабелем, то получаем вот что:
| Код: | SEND OK
OK
AT+CREG=2
OK
AT+CREG?
+CREG: 2,1,"000A","0055"
OK
AT+CREG=0
OK
AT+CENG?
+CENG: 1,0
+CENG: 0,"0831,63,0,257,02,44,0055,11,00"
+CENG: 1,"0023,60,48"
+CENG: 2,"0822,46,44"
+CENG: 3,"0024,45,??"
+CENG: 4,"0834,45,62"
+CENG: 5,"0022,44,??"
+CENG: 6,"0837,39,40"
OK
AT+CIPSTATUS
OK
STATE: CONNECT OK
ATE0
OK
>
SEND OK
OK
AT+CREG=2
OK
AT+CREG?
+CREG: 2,1,"000A","0055"
OK
AT+CREG=0
OK
AT+CENG?
+CENG: 1,0
+CENG: 0,"0831,63,0,257,02,44,0055,11,00"
+CENG: 1,"0023,60,48"
+CENG: 2,"0822,47,44"
+CENG: 3,"0024,45,??"
+CENG: 4,"0834,44,62"
+CENG: 5,"0022,43,??"
+CENG: 6,"0837,39,40"
OK
AT+CIPSTATUS
OK
STATE: CONNECT OK
ATE0
OK
> |
и так до бесконечности.
Это АТ команды gprs модема.
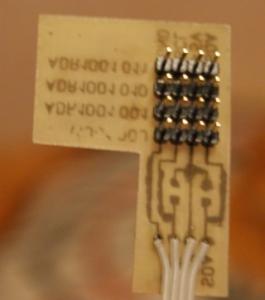
А вот если мы хотим поиметь NMEA, то ещё раз обращаю внимание на рисунок, внизу: "6 пин соединён с ТХ GPS, так что если туда подрубиться, можно поиметь GPS данные"
Итого нам прямая дорога делать свой шнурок...
Попутно подтвердилось, что аккум заряжается через порт 
А также то, что прослушка не влияет на передачу данных по GPRS 
| Описание: |
| Варианты работы с трекером |
|
| Размер файла: |
41.02 KB |
| Просмотрено: |
16423 раз(а) |
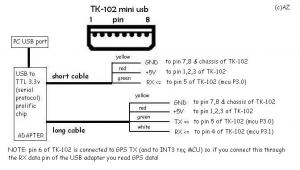
Варианты работы с трекером »»»
|
_________________
Владимир
[img:f45f24a24c]http://baf.belastro.net/static/going_baf.jpg[/img:f45f24a24c]
[img:b2f591ea1d]http://baf.belastro.net/static/going_baf.jpg[/img:b2f591ea1d]

|
|
| Вернуться к началу |
|
 |
 Deimos Deimos
Site Admin

Зарегистрирован: 10.07.2007
Сообщения: 6194
Благодарности: 79
|
|
Добавлено: Пн Фев 28, 2011 09:30 Заголовок сообщения: |
|
|
Великолепно! Изумительно! Я счастлив!
А если по делу, то вопросы следующие:
1. на какой скорости идёт обмен?
2. что требуется для поддержания всего этого безобразия со стороны микроконтроллера?
3. Какие данные надо разбирать и каким образом для получения информации о положении и высоте? (больше интересует именно высота)
_________________
Алексей
Профи-диванщик с опытом, есть диплом А4 в рамке.
|
|
| Вернуться к началу |
|
|
|
Pova
Модератор
Зарегистрирован: 10.07.2007
Сообщения: 1798
Благодарности: 15
|
|
| Вернуться к началу |
|
|
Deimos
Site Admin
Зарегистрирован: 10.07.2007
Сообщения: 6194
Благодарности: 79
|
|
Добавлено: Пн Фев 28, 2011 12:29 Заголовок сообщения: |
|
|
2. Нужно ли слать какие-то управляющие команды для того, чтобы этот обмен оживить?
_________________
Алексей
Профи-диванщик с опытом, есть диплом А4 в рамке.
|
|
| Вернуться к началу |
|
|
 Lupus Lupus
RadioAdmin

Зарегистрирован: 10.07.2007
Сообщения: 4337
Благодарности: 100
Откуда: Minsk, Belarus
|
|
Добавлено: Пн Фев 28, 2011 17:10 Заголовок сообщения: |
|
|
Вскрытие, т.е. опыты, покажут, но заранее могу предположить с большой уверенностью, что ничего не надо -- GPS-приёмник самостоятельно льёт информацию, как только на него подано напряжение. Я имел дело только с двумя, оба Garmin разной серии, и оба вели себя так.
Я так понял, что нужен провод типа "long cable", только Tx-провод которого подсоединён к пину 6 а не 5? Нужно ехать на Жданы за разъёмом. Но вот как его паять...  Очень уж он мелкий. Очень уж он мелкий.
_________________
 
_________________________________________________
"Вит, cкоро Геминиды!"  (с) Pova (с) Pova
"Познавший себя -- собственный палач." (с) Ф. Ницше
"Просто я живу на улице Ленина
И меня зарубает время от вре-ме-ни..." (с) Ф. Чистяков
|
|
| Вернуться к началу |
|
|
Deimos
Site Admin
Зарегистрирован: 10.07.2007
Сообщения: 6194
Благодарности: 79
|
|
Добавлено: Пн Фев 28, 2011 17:15 Заголовок сообщения: |
|
|
Походу нам будет достаточно лишь трёх проводов - Tx (6), Vcc, GND.
_________________
Алексей
Профи-диванщик с опытом, есть диплом А4 в рамке.
|
|
| Вернуться к началу |
|
|
Lupus
RadioAdmin
Зарегистрирован: 10.07.2007
Сообщения: 4337
Благодарности: 100
Откуда: Minsk, Belarus
|
|
Добавлено: Вт Мар 01, 2011 05:14 Заголовок сообщения: |
|
|
Сегодня купил ещё одну партию электроники:
1). Пять цифровых датчиков температуры LM75AD в корпусе SO8.
2). Две микросхемы L293DNE -- двойной Н-мост, для управления моторчиком. Корпус DIP16.
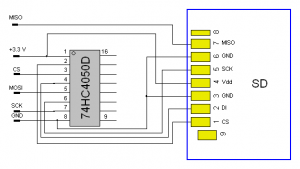
3). Две микросхемы 74HC4050D для самодельного SD-шилда (см. ниже).
4). Аналоговый датчик давления MPX2202AP.
5). Часы реального времени DS1305N (SPI-интерфейс).
Для часов нужно купить ещё на Жданах кварц 32768 Гц, и в принципе на этом всё -- останется только мелочёвка.
Итого, у нас остаётся последняя заморская закупка электроники -- магнитный компас и акселерометр.
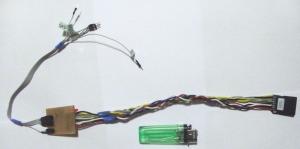
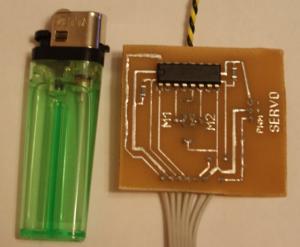
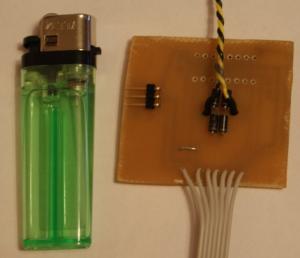
Сегодня сделал домотканый SD-шилд, тестовая версия. Контактные провода в Arduino снабжены маркерами, на плате есть подписи под все выводы. Я надеюсь, теперь у нас получится логирование данных на карту памяти...
С Лёши -- схема для управления моторчиком и сервой. Если схема будет завтра, то плату смогу отдать после работы в четверг. Возможно, также сделаю платы датчиков температуры
| Описание: |
|
| Размер файла: |
29.59 KB |
| Просмотрено: |
16352 раз(а) |
|
| Описание: |
| SD-шилд в виде двух хвостов. |
|
| Размер файла: |
25.3 KB |
| Просмотрено: |
16352 раз(а) |

SD-шилд в виде двух хвостов. »»»
|
| Описание: |
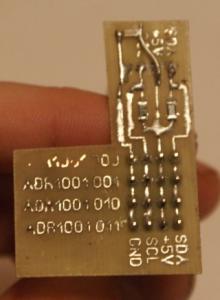
| Шилд со стороны контактов. Красный светодиод светится при подаче питания +3,3 В на шилд. |
|
| Размер файла: |
32.64 KB |
| Просмотрено: |
16352 раз(а) |
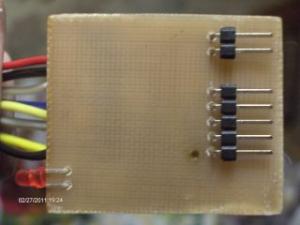
Шилд со стороны контактов. Красный светодиод светится при подаче питания +3,3 В на шилд. »»»
|
| Описание: |
| Компонентов всего три -- НЕХ-конвертер, светодиод и резистор на 100 Ом для ограничения тока через светодиод. |
|
| Размер файла: |
55.79 KB |
| Просмотрено: |
16352 раз(а) |
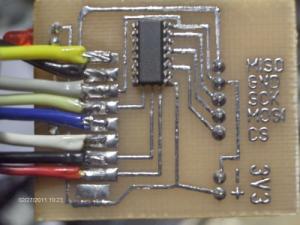
Компонентов всего три -- НЕХ-конвертер, светодиод и резистор на 100 Ом для ограничения тока через светодиод. »»»
|
| Описание: |
|
| Размер файла: |
6.39 KB |
| Просмотрено: |
16352 раз(а) |
|
_________________
_________________________________________________
"Вит, cкоро Геминиды!" (с) Pova
"Познавший себя -- собственный палач." (с) Ф. Ницше
"Просто я живу на улице Ленина
И меня зарубает время от вре-ме-ни..." (с) Ф. Чистяков
|
|
| Вернуться к началу |
|
|
|
Pova
Модератор
Зарегистрирован: 10.07.2007
Сообщения: 1798
Благодарности: 15
|
|
| Вернуться к началу |
|
|
Deimos
Site Admin
Зарегистрирован: 10.07.2007
Сообщения: 6194
Благодарности: 79
|
|
Добавлено: Ср Мар 02, 2011 00:36 Заголовок сообщения: |
|
|
С SD-картой поигрался сегодня. Всё работает на ура. С чем вас и поздравляю.
_________________
Алексей
Профи-диванщик с опытом, есть диплом А4 в рамке.
|
|
| Вернуться к началу |
|
|
Lupus
RadioAdmin
Зарегистрирован: 10.07.2007
Сообщения: 4337
Благодарности: 100
Откуда: Minsk, Belarus
|
|
Добавлено: Чт Мар 03, 2011 21:57 Заголовок сообщения: |
|
|
Отлично, что получилось с нашим SD-шилдом-- заморского ждать месяц и стоит он $15, а наш -- $1 и одна ночь...
За вчера-сегодня сделал шилд для движков (сервы и азимутального моторчика) и шилд для термодатчиков. Все выводы снабжены маркерами.
Шилд для моторчиков сделан на основе микрухи L293DNE, ток -- до 600 мА, напряжение питания микросхемы 5 В, двигателей 6 В. Управление двигателями -- ШИМ-сигналы (2 независимых ШИМ).
Термодатчики -- на основе LM75A, цифровые по протоколу I2C, адреса задаются хардово (адреса прописаны на платах термодатчиков и на распределительной плате). Питане 5В.
| Описание: |
| Шилд моторов -- общий вид. |
|
| Размер файла: |
29.06 KB |
| Просмотрено: |
16246 раз(а) |

Шилд моторов -- общий вид. »»»
|
| Описание: |
| Шилд моторов -- сторона компонентов. |
|
| Размер файла: |
41.35 KB |
| Просмотрено: |
16246 раз(а) |
Шилд моторов -- сторона компонентов. »»»
|
| Описание: |
| Шилд моторов -- сторона разъёмов. |
|
| Размер файла: |
34.4 KB |
| Просмотрено: |
16246 раз(а) |
Шилд моторов -- сторона разъёмов. »»»
|
| Описание: |
| Шилд термодатчиков -- общий вид. |
|
| Размер файла: |
47.36 KB |
| Просмотрено: |
16246 раз(а) |

Шилд термодатчиков -- общий вид. »»»
|
| Описание: |
| Шилд моторов -- распределитель, сторона компонентов. |
|
| Размер файла: |
21.73 KB |
| Просмотрено: |
16246 раз(а) |
Шилд моторов -- распределитель, сторона компонентов. »»»
|
| Описание: |
| Шилд моторов -- распределитель, сторона разъёмов. |
|
| Размер файла: |
13.91 KB |
| Просмотрено: |
16246 раз(а) |
Шилд моторов -- распределитель, сторона разъёмов. »»»
|
| Описание: |
| Шилд моторов -- термодатчики , сторона компонентов. |
|
| Размер файла: |
66.27 KB |
| Просмотрено: |
16246 раз(а) |

Шилд моторов -- термодатчики , сторона компонентов. »»»
|
| Описание: |
| Шилд моторов -- термодатчики, сторона радиаторов. |
|
| Размер файла: |
22.8 KB |
| Просмотрено: |
16246 раз(а) |

Шилд моторов -- термодатчики, сторона радиаторов. »»»
|
_________________
_________________________________________________
"Вит, cкоро Геминиды!" (с) Pova
"Познавший себя -- собственный палач." (с) Ф. Ницше
"Просто я живу на улице Ленина
И меня зарубает время от вре-ме-ни..." (с) Ф. Чистяков
|
|
| Вернуться к началу |
|
|
Deimos
Site Admin
Зарегистрирован: 10.07.2007
Сообщения: 6194
Благодарности: 79
|
|
Добавлено: Сб Мар 05, 2011 00:34 Заголовок сообщения: |
|
|
Сегодня были проведены эксперименты по проверке работоспособности свежеразработанных плат, а также в совместном функционировании имеющихся в наличии компонентов.
Вывод: плата для управления движками работает, как по части ДПТ, так и по части сервопривода, термодатчики работают, связка с SD-картой тоже работает.
Из того, что не касается железа, я проверил концепцию работы планировщика задач и сделал каркас системы сохранения телеметрии. Я вполне удовлетворён результатами сегодняшней работы, однако предстоит сделать ещё очень много всего...
Я не буду рассматривать все аспекты, остановлюсь на своих, программных:
1. Оживить режим управления ориентацией по основной схеме (после покупки компаса), так и по резервной (поворот на свет), компенсация вращения системы.
2. Управление нагревателями системы терморегулирования
3. Программная связь с фотоаппаратом, циклограммы съёмки
4. Детектирование падения и сброс шара как по основной (g=0), так и по резервной схеме (время в полёте)
5. Поддержка работы научной аппаратуры (цветовой датчик)
6. Подслушивание NMEA-данных с GPS-трекера
7. Работа с часами реального времени
И много других страшных вещей.
_________________
Алексей
Профи-диванщик с опытом, есть диплом А4 в рамке.
|
|
| Вернуться к началу |
|
|
biz_0n
Модератор

Зарегистрирован: 01.04.2008
Сообщения: 403
Благодарности: 2
Откуда: Беларусь
|
|
Добавлено: Чт Мар 10, 2011 00:38 Заголовок сообщения: |
|
|
интересно, а главное вовремя
http://habrahabr.ru/blogs/arduino/115176/
_________________
<=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=>
Пятнадцать человек на сундук мертвеца,
Йо-хо-хо, и бутылка рому!
<=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=>
|
|
| Вернуться к началу |
|
|
Lupus
RadioAdmin
Зарегистрирован: 10.07.2007
Сообщения: 4337
Благодарности: 100
Откуда: Minsk, Belarus
|
|
Добавлено: Чт Мар 10, 2011 00:46 Заголовок сообщения: |
|
|
Я её видел ещё до того, как начал делать SD-шилд.  Но решил делать с микрухой, а не на делителях. Но решил делать с микрухой, а не на делителях.
_________________
_________________________________________________
"Вит, cкоро Геминиды!" (с) Pova
"Познавший себя -- собственный палач." (с) Ф. Ницше
"Просто я живу на улице Ленина
И меня зарубает время от вре-ме-ни..." (с) Ф. Чистяков
|
|
| Вернуться к началу |
|
|
|
Pova
Модератор
Зарегистрирован: 10.07.2007
Сообщения: 1798
Благодарности: 15
|
|
| Вернуться к началу |
|
|
Lupus
RadioAdmin
Зарегистрирован: 10.07.2007
Сообщения: 4337
Благодарности: 100
Откуда: Minsk, Belarus
|
|
Добавлено: Чт Мар 10, 2011 08:53 Заголовок сообщения: |
|
|
Общая структура зонда Yy озвучена выше -- оболочка массой 600 г., наполненная водородом, соединяется 30 м нейлоновой ниткой с куполом парашюта. Парашют снабжён жёстким каркасом, к которому крепятся стропы. Концы строп крепятся к площадке, к которой крепится коробка с полезной нагрузкой, способная свободно вращаться относительно площадки со стропами вокруг вертикальной оси. Предварительные тесты показали обнадёживающие результаты на счёт подобной системы ориентации.
Теперь о полезной нагрузке.
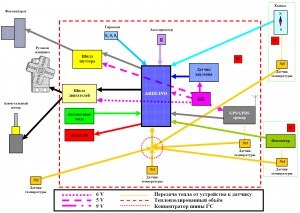
Общая структура полезной нагрузки второго стратосферного зонда (Yy)
Итак, структура полезной нагрузки нашего второго стратосферного зонда следующая (см. картинку в аттаче):
1). Центральным электронным блоком является плата Arduino Mega 2560. Эта плата отвечает за сбор данных с датчиков, запись этой информации на SD-карту, управление активной ориентацией коробки с полезной нагрузкой а также за управление процессом съёмки фотоаппаратом. Плата куплена и протестирована.
2). Система ориентации состоит из трёх датчиков:
а). Гироскоп -- электронная плата "Single Axis ±300°/s Gyro Breakout Board - LISY300AL", определяющая угловую скорость вращения коробки с полезной нагрузкой (вокруг вертикальной оси Oz). На основе информации об угловой скорости Arduino производит активную коррекцию ориентации коробки по азимуту. Питание осуществляется от Arduino. Плата куплена и протестирована.
б). Компас -- электронная плата с цифровым магнитным компасом, которая отвечает за определение ориентации системы по азимуту относительно розы ветров. Предоставляет систему отсчёта для гироскопа, совместно с которым позволяет определять текущую ориентацию коробки относительно сторон горизонта и прогнозировать ориентацию для последующих моментов времени. С целью уменьшения уровня помех со стороны металлических и электронных частей зонда компас будет помещён в специальную коробочку и вынесен за пределы коробки с полезной нагрузкой на диэлектрической штанге длиной 30-50 см. Питание осуществляется от Arduino. Плата будет у нас в наличие в течении ближайшего месяца.
в). Акселерометр -- электронная плата, определяющая ускорения полезной нагрузки вдоль трёх осей (Ox, Oy и Oz). Акселерометр имеет встроенный датчик невесомости, что позволит отследить момент лопания оболочки зонда. Питание осуществляется от Arduino. Плата будет у нас в наличие в течении ближайшего месяца.
3). Исполнительным устройством активной системы ориентации является коллекторный электромотор "Micro motor-reductor 250:1", ось редуктора которого будет крепится к площадке со стропами и осуществлять поворот коробки по азимуту. Arduino, получая информацию с компаса и гироскопа, будет выдавать управляющие импульсы на электромотор, чтобы компенсировать случайное вращение коробки. Питание осуществляется от 6 В. Мотор куплен и протестирован.
4). Основным по значимости бортовым устройством является GPS-трекер с GPRS-модемом TK102, который мы использовали в первом запуске. Трекер определяет координаты и высоту зонда от старта до высоты 18 км при взлёте и от 18 км до посадки при спуске. Основная задача устройства -- передать на web-сервер по GPRS координаты места приземления зонда. Данные о координатах и высоте также будут сохранятся на бортовую SD-карточку (первые тесты этой опции уже проведены). Питание трекера будет производится от 5 В с момента старта, что позволит подзаряжать его собственный аккумулятор и продлит время активной работы устройства после приземления.
5). Вторым по значимости бортовым устройством является цифровой фотоаппарат Canon (модель будет окончательно выбрана позже, весьма вероятно, что полетит тот же фотоаппарат, что и в первом зонде -- "Canon PowerShot A540"), который будет крепится на выносных штангах в подвесе сбоку коробки с полезной нагрузкой. Фотоаппарат будет иметь свой независимый источник питания (2 литиевые батарейки AA-формата).
6). Фотоаппарат будет поворачиваться относительно горизонтальной оси при помощи рулевой машинки (серво-привод) EMAX ES08D, которая управляется Arduino. За счёт активной ориентации коробки вокруг вертикальной оси система будет противодействовать неконтролируемому повороту коробки по азимуту , серво-привод будет задавать направление "взгляда" фотоаппарата в направлении вверх-вниз. Это позволит снимать круговые панорамы и видео-ролики на разной высоте, заранее наводясь на нужный азимут и высоту относительно горизонта. Питание осуществляется от 6 В. Рулевая машинка куплена и протестирована.
7). Управление затвором фотоаппарата и режимами съёмки осуществляет Arduino посредством специальной платы -- шилд шуттера, который питается от 5 В. Arduino будет не только назначать моменты съёмки (при достижении коробки и фотоаппаратом нужной ориентации), но и режимами съёмки фото/видео. Фотоаппарат будет иметь обратную связь с Arduino (на рисунке не показана), сообщая о завершении того или иного этапа своей работы. Тестовая плата шилда шуттера будет готова в ближайшее время.
8). Управление электромотором азимутальной ориентации и рулевой машинкой осуществляется через специальную плату -- шилд двигателей на основе H-моста L293DNE. Arduino через эту плату может управлять обоими моторами, потребляющими значительный ток. К плате подводится отдельная шина питания 6 В. Тестовая плата изготовлена и протестирована.
9). Зонд будет снабжён пятью цифровыми датчиками температуры LM75A. Один датчик (№1) -- внешний, будет измерять температуру за бортом, датчик №2 будет измерять температуру внутри коробки, датчик №3 -- температуру на аккумуляторе трекера, №4 -- температуру внутри фотометра (см. ниже), а №5 -- температуру компаса. Датчики передают информацию о температуре в Arduino по интерфейсу I2C, что позволяет использовать единую четырёхпроводную шину (для этого термодатчики подключаются к "концентратору"). Тестовые платы термодатчиков и "концентратора" шины I2C изготовлены и протестированы.
10). Термоизолированная коробка с бортовой электроникой, GPS-трекер, магнитный компас и фотометр будут снабжены резистивными нагревателями (красные квадраты с буковой "Н" на картинке), которые будут управляться Arduino посредством специальной платы -- шилд ключей нагревателей (на рисунке нк показана). Нагреватели и шилд ключей будут питаться от 3-9 В. Как видно из рисунка, вся электроника кроме фотоаппарата, двигателей, компаса, внешнего термодатчика и фотометра помещена в термоизолированную коробку, в которой будет поддерживаться режим термостабилизации -- работа нагревателей будет контролироваться Arduino по показаниям датчиков температуры внутри коробки и на аккумуляторе GPS-трекера. Режим термостабилизации также будет поддерживаться в коробке компаса и фотометра. Режим термостабилизации будет тестироваться в будущем.
11). Дополнительный бортовым устройством будет фотометр -- для исследования степени рассеивания солнечного света с высотой. В настоящее время ведётся разработка фотометра.
12). БП -- бортовой блок питания зонда. Будет выдавать напряжение 5 В, 6 В и 9 В и ток до 1-2 А. Основан на литиевых батарейках CR2-формата (6 В и 9 В), напряжение 5 В будет производиться за счёт использования "кренки". 6 В будут потреблять электродвигатели, нагреватели и шилд ключей нагревателей, 9 В -- Arduino, 5 В -- GPS-трекер и шилд шуттера. Остальная электроника будет запитываться от Arduino. Блок питания будет создан в будущем.
13). Для привязки значений, получаемых с датчиков, ко времени, а также для предотвращения потери этой привязки, зонд будет снабжён бортовыми часами на основе микросхемы DS1305N. Часы будут подключены к Arduino в ближайшее время.
14). Ещё одним важным элементом бортовой аппаратуры будет датчик давления MPX2103AP, который позволит фиксировать давление на всём протяжении полёта. Эту информацию можно использовать и для определения высоты подъёма зонда, когда выше 18 км GPS-трекер не будет выдавать значение высоты зонда. Датчик куплен, в ближайшее время будет создана плата для его подключения к Arduino.
15). Вся информация с датчиков (температура в 5 точках, значение угловой скорости и ускорения, давление, координаты, высота и скорость с GPS-трекера, время, азимут по компасу, данные фотометра) будет записываться на SD-карточку на борту. Для этого используется специальная плата -- шилд SD, в которую вставляется SD-карточка и подсоединяется к Arduino. Тестовая версия шилда SD создана и протестирована.
Вот, пожалуй, общая схема электронной начинки второго зонда. Некоторые моменты могут поменяться в будущем, но основная идея такая.
Отдельно стоит ещё остановится на моментах, не отражённых на рисунке:
1). Аварийная система ориентации -- на основе фоторезисторов (куплены). Если перед самым запуском будет магнитная буря, мы не сможем использовать компас как источник привязки к сторонам горизонта. В этом случае придётся ориентировать зонд по Солнцу, использую фотодатчики. Такую аварийную систему мы будем скоро делать и тестировать, но у меня уже сейчас возникают опасения, что мы сможем одним тумблером (бод защитной крышкой с замком блокиратором!  ) переключить Arduino c одного режима в другой... А уж о самостоятельном выборе Arduino режима работы и речи быть не может! ) переключить Arduino c одного режима в другой... А уж о самостоятельном выборе Arduino режима работы и речи быть не может!
2). Возможно, если будет время и силы, на борту разместится счётчик Гейгера. Он у меня есть, весит мало, считать будет просто импульсы за единицу времени, оптронная развязка будет. Но это пока так -- в проектах. Сначала нужно фотометр сделать нормальный (maxastro, как там идеи?).
3). В принципе, радиодиапазон 433-434 МГц является безлицензионным для мощностей передатчика до 10 мВт (вроде бы). Радиолюбители из России запускали подобный передатчик и прекрасно ловили его даже на портативные антенны! Можно купить FSK-передатчик типа RFM02-433-S2 за $7, который имеет SPI-интерфейс, и передавать телеметрию на землю -- будем её принимать в режиме реального времени. FSK (частотная манипуляция) хороша тем, что помехоустойчива. Жаль, что передать сигнал на зонд с земли такой мощностью не получится -- а то бы можно было и шарик отделять по команде с земли, и ещё много чего... В общем, можно подумать над этим и разузнать в БелГИЭ подробнее.
4). Вообще-то, мы планируем отделять шарик от зонда. На этот раз без пиротехники. Моторчик с редуктором вынимает штифт -- и всё. Команду на отсоединение шарика можно осуществить двумя способами:
а). Радиопередатчик-приёмник: передатчик, управляемый Arduino, и приёмник к нему, вроде бы, решат нашу задачу. Кроме этого, после приземления передатчик можно использовать для испускания сигналов, по которым его можно искать.
б). Использование ИК: ИК-диод управляется Arduino, приёмник -- TSOP1730 и контроллер, или использовать микросхему SIS-2. После приземления диод можно использовать для поиска зонда в темноте (обычным глазом местных аборигенов не видно, а через мобилу/фотик или камеру -- отлично видно).
В обоих случаях цена вопроса порядка $10-$15. Остаётся решить, нужно ли нам оно...
И последнее. Даже если активная стабилизация у нас не получится, мы сможем использовать наши датчики для съёмки панорам, но в этом случае не наводясь на нужный азимут, а ожидая, когда коробка сама повернётся на нужный угол. Так что в любом случае вся эта электроника не зря куплена (и будет докуплена). 
| Описание: |
| Структура зонда Yy. Первый вариант. |
|
| Размер файла: |
127.59 KB |
| Просмотрено: |
16071 раз(а) |
Структура зонда Yy. Первый вариант. »»»
|
_________________
_________________________________________________
"Вит, cкоро Геминиды!" (с) Pova
"Познавший себя -- собственный палач." (с) Ф. Ницше
"Просто я живу на улице Ленина
И меня зарубает время от вре-ме-ни..." (с) Ф. Чистяков
|
|
| Вернуться к началу |
|
|
|
vdg
ЛА
Зарегистрирован: 18.06.2008
Сообщения: 101
Благодарности: 0
|
|
Добавлено: Чт Мар 10, 2011 21:55 Заголовок сообщения: |
|
|
Софт для отображения траектории будет? Хоть бы и в гугльэсе.
_________________
uav.by
|
|
| Вернуться к началу |
|
|
Deimos
Site Admin
Зарегистрирован: 10.07.2007
Сообщения: 6194
Благодарности: 79
|
|
Добавлено: Чт Мар 10, 2011 23:04 Заголовок сообщения: |
|
|
Он есть, с прошлого полёта вся наземка остаётся.
_________________
Алексей
Профи-диванщик с опытом, есть диплом А4 в рамке.
|
|
| Вернуться к началу |
|
|
|
Pova
Модератор
Зарегистрирован: 10.07.2007
Сообщения: 1798
Благодарности: 15
|
|
| Вернуться к началу |
|
|
Lupus
RadioAdmin
Зарегистрирован: 10.07.2007
Сообщения: 4337
Благодарности: 100
Откуда: Minsk, Belarus
|
|
Добавлено: Пт Мар 11, 2011 03:23 Заголовок сообщения: |
|
|
Только сегодня говорил Максу (biz_0n), что жалею, что у нас нет на борту ещё одного запасного GPS.
Итак, по многочисленным просьбам -- список предстоящих тестов (основных, побочные -- отдельным списком, пока не публикую). Порядок пунктов не отражает порядок проведения. Подробно не расписывал -- всё равно это будет по месту придумываться. Это мой беглый взгляд, т.е. IMHO, так что дискуссия приветствуется.
Предстоящие тесты:
1). Аварийная система ориентации (АСО):
а). Протестировать поворот коробки с полезной нагрузкой за источником света (схема на двух фоторезисторах).
б). Полётная АСО: испытание в солнечный день.
2). Штатная система ориентации (ШСО):
а). Тесты поворота коробки с полезной нагрузкой на заданные углы по показаниям гироскопа и компаса. Определение параметров гистерезиса углового поворота (в помещении и на улице).
б). Имитация свободного падения (получение сигнала g=0 от акселерометра).
3). Система съёмки:
а). Управление режимами съёмки с Arduino. Переключение между режимами. Проверка корректности алгоритма съёмки при штатной и аварийной системах ориентации, а также при пассивной ориентации.
б). Калибровка угловых поворотов рулевой машинки.
в). Получение сигнала от фотоаппарата о готовности к дальнейшим действиям (на время съёмкии и записи ролика фотик занят).
г). Проверка возможности переключения в RAW и изменение экспозиции (нужно для научной части).
4). Давление: калибровка датчика в барокамере (Pova имеет к ней доступ).
5). Температура:
а). Калибровка датчиков от -15 oС до +50 oС, внешнего датчика -- от -60 oС до +50 oС.
б). Тест алгоритма термостатирования.
6). Отделение шарика.
7). Тесты в воздухе:
а). Проверка всех систем на воздушном змее (режим ШСО, АСО и пассивная ориентация).
б). Пробная съёмка панорам.
в). Отделение от змея по таймеру.
_________________
_________________________________________________
"Вит, cкоро Геминиды!" (с) Pova
"Познавший себя -- собственный палач." (с) Ф. Ницше
"Просто я живу на улице Ленина
И меня зарубает время от вре-ме-ни..." (с) Ф. Чистяков
|
|
| Вернуться к началу |
|
|
Deimos
Site Admin
Зарегистрирован: 10.07.2007
Сообщения: 6194
Благодарности: 79
|
|
Добавлено: Пт Мар 11, 2011 09:32 Заголовок сообщения: |
|
|
Надо сделать селектор режимов работы ардуины. Это делается выносным набором перемычек, при личной встрече расскажу, что это будет, а к тому времени прикину необходимые ресурсы по пинам ардуины.
Фактически этим будут определяться лишь допускаемые к планированию задачи управления. По управлению задачи предполагаются независимыми, воздействие по принципу "кто первый встал - того и тапки".
_________________
Алексей
Профи-диванщик с опытом, есть диплом А4 в рамке.
|
|
| Вернуться к началу |
|
|
|
|
Вы не можете начинать темы
Вы не можете отвечать на сообщения
Вы не можете редактировать свои сообщения
Вы не можете удалять свои сообщения
Вы не можете голосовать в опросах
Вы можете вкладывать файлы
Вы можете скачивать файлы
|
|




















